Реклама
Истовремена локализација и мапирање (СЛАМ) вероватно није фраза коју свакодневно користите. Међутим, неколико најновијих цоол технолошких чуда користе овај поступак сваке милисекунде свог животног века.
Шта је СЛАМ? Зашто нам треба? И о којим се те цоол технологијама прича?
Од акронима до апстрактне идеје
Ево кратке игре за вас. Који од ових не припада?
- Самовозна возила
- Апликације проширене стварности
- Аутономна ваздушна и подводна возила
- Ношење мешане стварности
- Тхе Роомба
Можда мислите да је одговор лако задња ставка на листи. На неки начин сте у праву. На други начин, ово је била трик игра јер су све те ставке повезане.

Право питање (веома цоол) игре је следеће: Шта све ове технологије чини изведивим? Одговор: истовремено локализација и мапирање, или СЛАМ! како то цоол деца кажу.
У општем смислу, сврха СЛАМ алгоритама је довољно једноставна за понављање. Робот ће истовремено користити локализацију и мапирање за процену свог положаја и оријентације (или позе) у простору док ствара мапу свог окружења. То омогућава роботу да препозна где се налази и како да се креће кроз неки непознати простор.
Дакле, да, то значи да овај алгоритам фантастичне димензије чини проценом положаја. Још једна популарна технологија, Глобал Поситионинг Систем (или ГПС) Како функционира ГПС праћење и шта можете пратити?ГПС. Ми то знамо као технологију која нас води од А до Б. Али ГПС је више од тога. Постоји свет могућности, а ми не желимо да пропустите. Опширније проценио је положај од првог заливског рата деведесетих.
Разликовање СЛАМ-а и ГПС-а
Па зашто онда потреба за новим алгоритмом? ГПС има два својствена проблема. Прво, док је ГПС тачан у односу на глобални ниво, и прецизност и тачност смањују скали у односу на собу, сто или мали пресек. ГПС има тачност до метра, али који центиметар? Милиметар?
Друго, ГПС не ради добро под водом. Не мислим уопште. Слично томе, перформансе су тачкасте у зградама са дебелим бетонским зидовима. Или у подрумима. Идеш. ГПС је сателитски систем који пати од физичких ограничења.
Дакле, алгоритми СЛАМ имају за циљ да побољшају осећај положаја за наше најнапредније гадгете и машине.
Ови уређаји већ имају литанију сензора и периферних уређаја. СЛАМ алгоритми користе податке из што већег броја помоћу математике и статистике.
Пилетина или јаје? Позиција или мапа?
Математика и статистика су потребни да би се одговорио на сложени проблем: да ли се положај користи за прављење мапе околине или се карта окружења користи за израчунавање положаја?
Мислио време експеримента! Ви сте међудимензионално изобличени у непознато место. Шта је прво што урадите? Паника? ОК, смири се, удахни. Узми другу. Па, шта је друго што радите? Осврните се око себе и покушајте да пронађете нешто познато. Лева столица је с ваше леве стране. Биљка је с ваше десне стране. Стол за кафу је пред вама.
Затим следећи парализујући страх "Где сам, дођавола?" истроши се, почнеш да се крећеш. Чекај, како функционише покрет у овој димензији? Направите корак напред. Столица и биљка су све мањи, а стол све већи. Сада можете потврдити да се у ствари крећете напред.
Проматрања су кључна за побољшање тачности процјене СЛАМ-а. У видеу испод, како се робот креће од маркера до маркера, он прави бољу мапу окружења.
Враћајући се другој димензији, што више ходате около више се оријентишете. Прелазак на све стране потврђује да је кретање у овој димензији слично вашој кућној димензији. Како идете десно, биљка се повећава. Уз помоћ тога видите и друге ствари које у овом новом свету препознајете као оријентире, које вам омогућавају да самопоуздано лутате.
Ово је у суштини процес СЛАМ-а.
Уноси у процес
Да би се направиле ове процене, алгоритми користе неколико података који се могу категорисати као унутрашњи или екстерни. За ваш пример димензионалног транспорта (признајте, имали сте забаван пут), унутрашња мерења су величина корака и правца.
Спољна мерења су у облику слика. Препознавање оријентира попут биљке, столице и стола једноставан је задатак за очи и мозак. Најмоћнији познати процесор - људски мозак - је у стању да снима те слике и не само да идентификује објекте, већ и процени удаљеност до тог објекта.
На жалост (или на срећу, у зависности од вашег страха од СкиНет-а), роботи немају људски мозак као процесор. Машине се ослањају на силиконске чипове са људским писаним кодом као мозак.
Остали комади машина врше спољна мерења. Периферни уређаји попут жироскопа или друге инерцијалне мерне јединице (ИМУ) су од помоћи у томе. Роботи, попут аутомобила који се возе, такође користе одометрију положаја точкова као интерно мерење.

Споља, аутомобил који вози и други роботи користе ЛИДАР. Слично као што радар користи радио таласе, ЛИДАР мери рефлексне светлосне импулсе како би идентификовао удаљеност. Светло које се користи обично је ултраљубичасто или близу инфрацрвеног зрачења, слично као инфрацрвени сензор дубине.
ЛИДАР шаље десетине хиљада импулса у секунди како би створио изузетно димензионалну тродимензионалну мапу облака тачака. Дакле, да, следећи пут када се Тесла котрља на аутопилоту, упуцаће вас ласером. Пуно пута.
Поред тога, СЛАМ алгоритми користе статичке слике и технике рачунарског вида као спољно мерење. То се ради једном камером, али може се постићи још тачније стерео паром.
Унутра у црној кутији
Унутрашња мерења ће ажурирати процењени положај, који се може користити за ажурирање спољне мапе. Вањска мјерења ће ажурирати процијењену карту, која се може користити за ажурирање положаја. Можете то сматрати проблемом закључивања, а идеја је пронаћи оптимално решење.
Чест начин за то је вероватноћа. Технике попут филтра честица приближни положај и мапирање помоћу Баиесових статистичких закључака.
Филтер за честице користи одређени број честица раширених Гауссовом дистрибуцијом. Свака честица „предвиђа“ тренутни положај робота. Свакој честици је додељена вероватноћа. Све честице почињу с истом вероватноћом.
Када се изврше мерења која се међусобно потврђују (као што је корак напред = табела постаје већа), честицама које су "тачне" у свом положају поступно се дају веће вероватноће. Честице које су удаљене имају мању вероватноћу.
Што више робота може да препозна, то је боље. Оријентири дају повратну информацију о алгоритму и омогућавају прецизније прорачуне.
Текуће апликације помоћу СЛАМ алгоритама
Разбијмо ово, цоол део технологије, цоол део технологије.
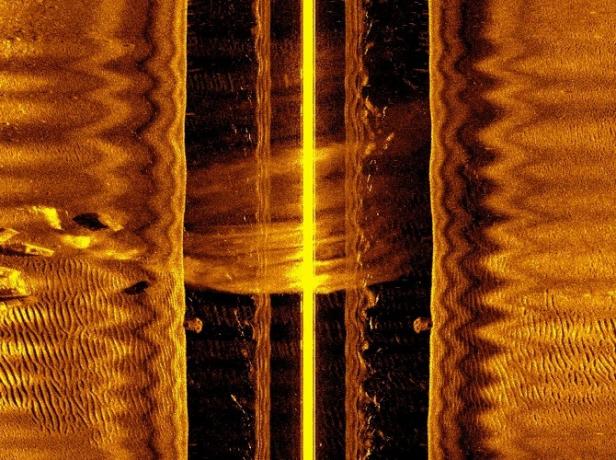
Аутономна подводна возила (АУВс)
Беспилотне подморнице могу да раде аутономно користећи СЛАМ технике. Интерни ИМУ пружа податке о убрзању и кретању у три правца. Уз то, АУВ-ови користе сонар одоздо окренут за процену дубине. Бочни сонар за скенирање ствара слике морског дна, у распону од неколико стотина метара.
Мешане стварности
Мицрософт и Магиц Леап произвели су носиве наочаре које се представљају Апликације за мешовиту стварност Мешовита стварност Виндовс: шта јесте и како то сада покушатиВиндовс Микед Реалити је нова функција која вам омогућава да користите Виндовс 10 у виртуелној и проширеној стварности. Ево зашто је узбудљиво и како сазнати да ли ваш рачунар то подржава. Опширније . Процена положаја и израда мапе је пресудна за ове носивости. Уређаји користе мапу како би виртуелне објекте поставили на стварне објекте и омогућили им међусобну интеракцију.
Пошто су ове носивости мале, не могу користити велике периферне уређаје као што су ЛИДАР или сонар. Уместо тога, за мапирање окружења користе се мањи инфрацрвени сензори дубине и камере окренуте ка споља.
Возила са сопственим аутомобилом
Аутономни аутомобили имају малу предност у односу на носивост. Са много већом физичком величином, аутомобили могу да држе веће рачунаре и имају више периферних уређаја за вршење унутрашњих и спољних мерења. На много начина, аутомобили који самостално возе представљају будућност технологије и у погледу софтвера и хардвера.
СЛАМ технологија се побољшава
С обзиром да се СЛАМ технологија користи на више различитих начина, само је питање времена када ће се усавршити. Једном када се свакодневно виђају самостално вожени аутомобили (и друга возила), знаћете да су истовремено локализација и мапирање спремни за употребу свих.
Технологија самосталне вожње побољшава се сваким даном. Желите знати више? Погледајте детаљни приказ МакеУсеОфа како раде аутомобили који возе самостално Како раде самовозећи аутомобили: матице и вијци који стоје иза Гооглеовог програма аутономних аутомобилаБити у стању да путујете напред-назад док спавате, једете или надокнађујете своје омиљене блогови су концепт који је подједнако привлачан и наизглед далековидан и заправо превише футуристички десити се. Опширније . Такође би могли бити заинтересовани за како хакери циљају повезане аутомобиле.
Кредитна слика: цхески_в /Депоситпхотос
Том је софтверски инжењер са Флориде (узвикује Флорида Ман-у) са страшћу према писању, факултетском фудбалу (идите Гаторс!), ЦроссФит и Окфорду.